Optimization: introduction¶
Optimization or mathematical programming considers the problem $$ \begin{array}{ll} \text{minimize} & f(\mathbf{x}) \\ \text{subject to} & \mathbf{x} \in C \end{array} $$
- Vector $\mathbf{x}$ in a vector space $V$ is the optimization variable.
- In most cases $V=\mathbb{R}^d$.
- Function $f: V \to \mathbb{R}$ is the objective function.
- $C \subset V$ is called the constraint set.
- If $C = V$, the problem is unconstrained.
- Otherwise it is constrained.
- $\mathbf{x}^{\star}$ is called a (global) solution if $f(\mathbf{x}^{\star}) \le f(\mathbf{x})$ for all $\mathbf{x}\in C$.
- Solution may not be unique (recall the least squares problem).
- Solution may not even exist (e.g., $f(x)=1/x$, $C=\{x\in\mathbb{R}: x \ge 0\}$).
- Vector $\mathbf{x}$ in a vector space $V$ is the optimization variable.
Possible confusion:
- Statisticians mostly talk about maximization: $\max \, L(\mathbf{\theta})$.
- Optimizers talk about minimization: $\min \, f(\mathbf{x})$.
Why is optimization important in statistics?
- Maximum likelihood estimation (MLE).
- Maximum a posteriori (MAP) estimation in Bayesian framework.
- Machine learning: minimize a loss + certain regularization.
- ...
Global optimization
- Worst-case complexity grows exponentially with the $d$ and $n$
- Even small problems, with a few tens of variables, can take a very long time (e.g., hours or days) to solve.
Local optimization
- Local solution: $\mathbf{x}^{\dagger}$ such that $f(\mathbf{x}^{\dagger}) \le f(\mathbf{x})$ for all $\mathbf{x}\in C \cap \mathbf{N}(\mathbf{x}^{\dagger})$, where $\mathbf{N}(\mathbf{x}^{\dagger})$ is a certain neighborhood of $\mathbf{x}^{\dagger}$.
- Can be found relatively easy, using only local information on $f$, e.g., gradients.
- Local optimization methods can be fast, can handle large-scale problems, and are widely applicable.
Our major goal (or learning objectives) is to
- have a working knowledge of some commonly used optimization methods:
- convex programming with emphasis in statistical applications
- Newton-type algorithms
- first-order methods
- expectation-maximization (EM) algorithm
- majorization-minimization (MM) algorithm
- implement some of them in homework
- get to know some optimization tools in Julia
- have a working knowledge of some commonly used optimization methods:
Convex Optimization 101¶
Convex optimization¶
Problem $$ \begin{array}{ll} \text{minimize} & f(\mathbf{x}) \\ \text{subject to} & \mathbf{x} \in C \end{array} $$
- $f$ is a convex function $$ f(\alpha\mathbf{x} + (1-\alpha)\mathbf{y}) \le \alpha f(\mathbf{x}) + (1-\alpha) f(\mathbf{y}), \quad \forall\mathbf{x}, \mathbf{y} \in \text{dom}f, \forall\alpha \in [0, 1]. $$
- $C$ is a convex set $$ \mathbf{x}, \mathbf{y} \in C \implies \alpha\mathbf{x} + (1-\alpha)\mathbf{y} \in C, \quad \forall\alpha \in [0, 1]. $$
More familiar formulation: take $V=\mathbb{R}^d$, $$ \begin{array}{ll} \text{minimize} & f_0(\mathbf{x}) \\ \text{subject to} & f_i(\mathbf{x}) \le b_i, \quad i=1, 2, \dotsc, m. \end{array} $$ where $f_i: \mathbb{R}^d \to \mathbb{R}$ are convex functions.
- Equality constraint: $f_i(\mathbf{x})=b_i \iff f_i(\mathbf{x}) \le b_i$ and $-f_i(\mathbf{x}) \le -b_i$
- Hence only linear equality constraints $\mathbf{A}\mathbf{x}=\mathbf{b}$ are allowed (why?)
- Equality constraint: $f_i(\mathbf{x})=b_i \iff f_i(\mathbf{x}) \le b_i$ and $-f_i(\mathbf{x}) \le -b_i$
Why do we care about convex optimization?
Fact. Any local solution of a convex optimization problem is a global solution.
Role of convex optimization
- Initialization for local optimization
- Convex heuristics for nonconvex optimization
- Bounds for global optimization
Convex sets¶
The underlying space is a vector space $V$ unless otherwise stated.
Line segments: for given $\mathbf{x}$, $\mathbf{y}$, $$ \{\alpha \mathbf{x} + (1-\alpha)\mathbf{y}: 0 \le \alpha \le 1\}. $$
A set $C$ is convex if for every pair of points $\mathbf{x}$ and $\mathbf{y}$ lying in $C$ the entire line segment connecting them also lies in $C$.

Examples
- Singleton: $\{\mathbf{a}\}$.
- Euclidean space $\mathbb{R}^d$.
Norm ball: $B_r(\mathbf{c})=\{\mathbf{x}: \|\mathbf{x}-\mathbf{c}\| \le r\}$ for any proper norm $\|\cdot\|$.

$\ell_p$ "norm" $\|\mathbf{x}\|_p = (\sum_{i=1}^d |x_i|^p)^{1/p}$, $0<p<1$, in $\mathbb{R}^d$ is not a proper norm.
Hyperplane: $\{\mathbf{x}: \langle \mathbf{a}, \mathbf{x} \rangle = c \}$.
- Halfspace: $\{\mathbf{x}: \langle \mathbf{a}, \mathbf{x} \rangle \le c \}$ or $\{\mathbf{x}: \langle \mathbf{a}, \mathbf{x} \rangle < c \}$.
- Polyhedron: $\{\mathbf{x}: \langle \mathbf{a}_j, \mathbf{x} \rangle \le b_j,~j=1,\dots,m\} = \{\mathbf{x}: \mathbf{A}\mathbf{x} \le \mathbf{b}\}$.
- Positive semidefinite cone $\mathbb{S}^d_{+}=\{\mathbf{X}\in\mathbb{R}^{d\times d}: \mathbf{X} = \mathbf{X}^T, ~\mathbf{X} \succeq \mathbf{0} \}$ and set of positive definite matrices $\mathbb{S}^d_{++}=\{\mathbf{X}\in\mathbb{R}^{d\times d}: \mathbf{X}=\mathbf{X}^T, ~\mathbf{X} \succ \mathbf{0} \}$. (What is $V$?)
- Translation: $C + \mathbf{a} = \{\mathbf{x} + \mathbf{a}: \mathbf{x}\in C\}$ if $C$ is convex.
- Minkowski sum: $C + D=\{\mathbf{x}+\mathbf{y}: \mathbf{x}\in C, \mathbf{y}\in D\}$ if $C$ and $D$ are convex.
- Cartesian product: $C\times D=\{(\mathbf{x},\mathbf{y}): \mathbf{x}\in C, \mathbf{y}\in D\}$ if $C$ and $D$ are convex.
- Image $\mathcal{A}C$ of a convex set $C$ under a linear map $\mathcal{A}$.
- Inverse image $\mathcal{A}^{-1}C$ of a convex set $C$ under a linear map $\mathcal{A}$.
Convex cones¶
A set $C$ is a cone if for each $\mathbf{x}$ in $C$, the set $\{\alpha\mathbf{x}: \alpha > 0\} \subset C$.
- Some authors (e.g., Boyd & Vandenberghe) use instead $\{\alpha\mathbf{x}: \alpha \ge 0\}$ to include the origin.
- Is $\mathbb{S}_{++}^d$ a cone?
- A cone is unbounded.
A cone $C$ is a convex cone if it is also convex. Equivalently, a set $C$ is a convex cone if for any $\mathbf{x}, \mathbf{y}\in C$, $\{\alpha\mathbf{x} + \beta\mathbf{y}: \alpha, \beta > 0\} \subset C$.
Examples of convex cone
- Any subspace
- Any hyperplane passing the origin.
- Any halfspace whose closure passes the origin.
- $\mathbb{S}_{+}^d$, set of positive semidefinite matrices.
Second-order cone (Lorentz cone): $\{(\mathbf{x}, t): \|\mathbf{x}\|_2 \le t \}$.

Norm cone: $\{(\mathbf{x}, t): \|\mathbf{x}\| \le t \}$, where $\|\cdot\|$ is any norm.
Example of a nonconvex cone?
Affine sets¶
- A set $C$ is a affine if for each $\mathbf{x}, \mathbf{y}$ in $C$, the whole line $\{\alpha\mathbf{x}+(1-\alpha)\mathbf{y}: \alpha \text{ is a scalar} \} \subset C$.
- Convex.
- $C = \mathbf{c} + S$ for some $\mathbf{c}\in V$ and subspace $S$.
- We define $\text{dim}C = \text{dim}S$.
- Example
- Any singleton.
- Any subspace.
- Set of solutions of a linear system of equations: $\{\mathbf{x}: \mathbf{A}\mathbf{x}=\mathbf{b}\}$.
- In fact any affine set can be represented by the solution set of a linear system.
The intersection of an arbitrary collection of convex, affine, or conical sets is convex, affine, conical, respectively.
Generators¶
Convex combination: $\{\sum_{i=1}^m \alpha_i \mathbf{x}_i: \alpha_i \ge 0, ~\sum_{i=1}^m\alpha_i = 1\}$
Convex sets are closed under convex combination: any convex combination of points from a convex set $C$ belongs to $C$
Conic combination, affine conbination are defined similarly; similar closure properties also hold.
Convex hull: the convex hull of a nonempty set $C$ is the set of all convex combinations of points in $C$:
$$ \text{conv}C = \{\sum_{i=1}^m \alpha_i \mathbf{x}_i: \mathbf{x}_i\in C,~ \alpha_i \ge 0, i=1,\dotsc,m \text{ for some }m,~\sum_{i=1}^m\alpha_i = 1 \} $$ which is the smallest convex set containing $C$.
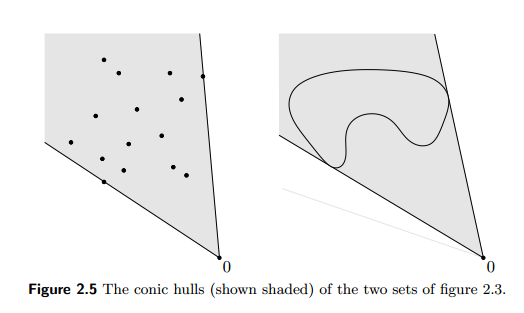
Conic hull $\text{cone}C$ drops the sum condition, and affine hull $\text{aff}C$ drops the nonnegativity conditions on $\alpha_i$s.
Affine dimension: $\text{dim}(C) \triangleq \text{dim}(\text{aff}C)$.
Example: simplex $$ S = \text{conv}\{\mathbf{v}_0, \mathbf{v}_1, \dotsc, \mathbf{v}_k\} $$ when $\mathbf{v}_0, \mathbf{v}_1, \dotsc, \mathbf{v}_k$ are affinely independent, i.e., $\mathbf{v}_1-\mathbf{v}_0, \dotsc, \mathbf{v}_k-\mathbf{v}_0$ are linearly independent.
- $\dim(S) = k$
- Unit simplex in $\mathbb{R}^d$: $\text{conv}\{\mathbf{0}, \mathbf{e}_1, \dots, \mathbf{e}_d\} = \{\mathbf{x}\in\mathbb{R}^d: \mathbf{x} \ge \mathbf{0}, ~ \mathbf{1}^T\mathbf{x} \le 1 \}$.
- Probability simplex in $\mathbb{R}^d$: $\Delta_{d-1} = \text{conv}\{\mathbf{e}_1, \dots, \mathbf{e}_d\} = \{\mathbf{x}\in\mathbb{R}^d: \mathbf{x} \ge \mathbf{0}, ~ \mathbf{1}^T\mathbf{x} = 1 \}$.
Relative interior¶
Most constraint sets in optimization does not have an interior, e.g, probability simplex. It is useful to define the interior relative to the affine hull: $$ \text{relint}C = \{\mathbf{x}\in C: (\exists r>0) B(\mathbf{x}, r) \cap \text{aff}C \subset C \} $$
- What is the relative interior of the probability simplex in $\mathbb{R}^3$?
Convex functions¶
Recall that a real-valued function $f$ is convex if $$ f(\alpha\mathbf{x} + (1-\alpha)\mathbf{y}) \le \alpha f(\mathbf{x}) + (1-\alpha) f(\mathbf{y}), \quad \forall\mathbf{x}, \mathbf{y} \in \text{dom}f, \forall\alpha \in [0, 1], $$
- If the inequality is strict for all $\alpha \in (0,1)$, then $f$ is strictly convex.
- $f$ is concave if $-f$ is convex.
Extended-value functions: it is often convenient to extend the domain of $f$ to the whole $V$ and allow to have the value $\infty$. Then $f:V \to \mathbb{R}\cup\{\infty\}$ and $$ \text{dom} f = \{\mathbf{x}: f(\mathbf{x}) < \infty \} $$ is the essential domain of $f$.
This extension allows us to consider the indicator function of a set: $$ \iota_C(\mathbf{x}) = \begin{cases} 0 & \mathbf{x} \in C \\ \infty & \mathbf{x} \notin C \end{cases} $$ so that a constrained optimization problem is converted to an unconstrained problem: $$ \min_{\mathbf{x}\in C} f(\mathbf{x}) = \min_{\mathbf{x}} f(\mathbf{x}) + \iota_C(\mathbf{x}) $$
Properness: a function $f$ is proper if $\text{dom}f \neq \emptyset$ and $f(\mathbf{x}) > -\infty$ for all $\mathbf{x}$.
Examples
- Any affine function (also concave).
- Any norm
- Indicator function of a nonempty convex set.
- Exponential: $f(x)=e^{ax}$.
- Powers: $f(x)=x^\alpha$ on $\mathbb{R}_{++}=\{x\in\mathbb{R}: x>0\}$. Convex if $\alpha\ge 1$, concave if $\alpha\in[0,1]$.
- Powers of absolute values: $f(x)=|x|^p$ on $\mathbb{R}$, if $p \ge 1$.
- Logarithm: $f(x)=\log x$ is concave in $\text{dom}f = \mathbb{R}_{++}$.
- Quadratic-over-linear function $f(x,y) = x^2/y$ with $\text{dom}f = \mathbb{R}\times\mathbb{R}_{++} = \{(x,y): x\in\mathbb{R}, y > 0\}$.
- Maximum: $f(\mathbf{x}) = \max\{x_1,\dotsc,x_d\}$.
- Log-sum-exp: $f(\mathbf{x}) = \log(e^{x_1}+\dotsb+e^{x_d})$, a smoothed version of $\max\{x_1,\dotsc,x_d\}$.
- Geometric mean: $f(\mathbf{x}) = \prod_{i=1}^d x_i^{1/d}$ is concave, with $\text{dom}f=\mathbb{R}_{++}^d$.
- Log-determinent: $f(\mathbf{X}) = \log\det\mathbf{X}$ is concave in $\text{dom}f = \mathbb{S}_{++}^d$.
Jensen's inequality¶
- Funciton $f$ is convex if and only if $$ f(\sum_{i=1}^m\mathbf{x}_i) \le \sum_{i=1}^m\alpha_i f(\mathbf{x}_i), \quad \forall \mathbf{x}_1, \dotsc, \mathbf{x}_m, ~\forall\alpha_i \ge 0, ~ \sum_{i=1}^m \alpha_i=1. $$
First-order condition (supporting hyperplane inequality)¶
If $f$ is differentiable (i.e., its gradient $\nabla f$ exists at each point in $\text{dom}f$, which is open), then $f$ is convex if and only if $\text{dom} f$ is convex and $$ f(\mathbf{y}) \ge f(\mathbf{x}) + \langle \nabla f(\mathbf{x}), \mathbf{y}-\mathbf{x} \rangle $$ for all $\mathbf{x}, \mathbf{y} \in \text{dom}f$.
$f$ is strictly convex if and only if strict inequality holds for all $\mathbf{y} \neq \mathbf{x}$.
Second-order condition¶
- If $f$ is twice differentiable (i.e., its Hessian $\nabla^2 f$ exists at each point in $\text{dom}f$, which is open), then $f$ is convex if and only if $\text{dom} f$ is convex and its Hessian is positive semidefinite:, i.e,
$$
\nabla^2 f(\mathbf{x}) \succeq \mathbf{0}
$$
for all $\mathbf{x} \in \text{dom} f$.
- If $\nabla^2 f(\mathbf{x}) \succ \mathbf{0}$, then $f$ is strictly convex.
Epigraph¶
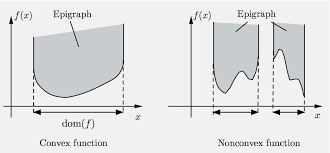
The epigraph of a function $f$ is the set $$ \text{epi}f = \{(\mathbf{x}, t): \mathbf{x}\in\text{dom}f,~ f(\mathbf{x}) \le t \}. $$
A function $f$ is convex if and only if $\text{epi}f$ is convex.
If $(\mathbf{y}, t)\in\text{epi}f$, then from the supporting hyperplance inequality, $$ t \ge f(\mathbf{y}) \ge f(\mathbf{x}) + \langle \nabla f(\mathbf{x}), \mathbf{y} - \mathbf{x} \rangle $$ or $$ \left\langle (\nabla f(\mathbf{x}), -1), (\mathbf{y}, t) - (\mathbf{x}, f(\mathbf{x})) \right\rangle \le 0. $$ This means that the hyperplane defined by $(\nabla f(\mathbf{x}),−1)$ supports $\text{epi}f$ at the boundary point $(\mathbf{x},f(\mathbf{x}))$:

An extended-value function $f$ is called closed if $\text{epi}f$ is closed.
Sublevel sets¶
$\alpha$-sublevel set of an extended-value function $f$ is $$ S_{\alpha} = \{\mathbf{x}\in\text{dom}f : f(\mathbf{x}) \le \alpha \}. $$
If $f$ is convex, then $S_{\alpha}$ is convex for all $\alpha$.
- Converse is not true: $f(x)=-e^{x}$.
Further if $f$ is continuous, then all sublevel sets are closed.
Operations that preserve convexity¶
(Nonnegative weighted sums) If $f$ and $g$ are convex and $\alpha$ and $\beta$ are nonnegative constants, then $\alpha f + \beta g$ is convex, with $\text{dom}f \cap \text{dom}g$.
- Extension: If $f(\mathbf{x},\mathbf{y})$ is convex in $\mathbf{x}$ for each fixed $\mathbf{y} \in \mathcal{A}$, and $w(\mathbf{y})\ge 0$ for all $y\in\mathcal{A}$, then the integral $g(\mathbf{x}) = \int_{\mathcal{A}} w(\mathbf{y})f(\mathbf{x},\mathbf{y})d\mathbf{y}$ is convex provided the integral exists.
(Composition with affine mapping) If $f$ is convex, then composition $f(\mathbf{A}\mathbf{x} + \mathbf{b})$ of $f$ with an affine map $\mathbf{x}\mapsto \mathbf{A}\mathbf{x} + \mathbf{b}$ is convex, with $\text{dom}g=\{\mathbf{x}:\mathbf{Ax}+\mathbf{b}\in\text{dom}f\}$.
(Pointwise maximum and supremum) If $f_i$ is convex for each fixed $i=1,\dotsc,m$, then $g(\mathbf{x}) = \max_{i=1,\dotsc,m} f_i(\mathbf{x})$ is convex, with $\text{dom}g = \cap_{i=1}^m\text{dom}f_i$.
- Extension: If $f(\mathbf{x},\mathbf{y})$ is convex in $x$, then $g(\mathbf{x}) = \sup_{\mathbf{y}\in\mathcal{A}}f(\mathbf{x},\mathbf{y})$ is convex, with $\text{dom}g=\{\mathbf{x}:(\forall\mathbf{y}\in\mathcal{A})(\mathbf{x},\mathbf{y})\in\text{dom}f, \sup_{\mathbf{y}\in\mathcal{A}} f(\mathbf{x},\mathbf{y})<\infty\}$.
(Composition) For $h:\mathbb{R}\to\mathbb{R}\cup\{\infty\}$ and $g:V\to\mathbb{R}\cup\{\infty\}$, if $h$ is convex and nondecreasing, and $g$ is convex, then $f = h \circ g$ is convex, with $\text{dom}f = \{\mathbf{x}\in\text{dom}g: g(\mathbf{x})\in\text{dom}h\}$.
(Paritial minimization) If $f(\mathbf{x},\mathbf{y})$ is jointly convex in $(\mathbf{x},\mathbf{y})$, then $g(\mathbf{x}) = \inf_{\mathbf{y}\in C} f(\mathbf{x},\mathbf{y})$ is convex provided it is proper and $C$ is nonempty convex, with $\text{dom}f = \{\mathbf{x}: (\exists\mathbf{y}\in C)(\mathbf{x},\mathbf{y})\in\text{dom}f\}$ (projection).
(Perspective) If $f(\mathbf{x})$ is convex and finite, then its perspective $g(\mathbf{x}, t)=t f(t^{-1}\mathbf{x})$ is convex, with $\text{dom}g=\{(\mathbf{x},t): t^{-1}\mathbf{x}\in\text{dom}f,~ t>0\}$.
Examples¶
A sum of convex functions is convex.
$f(\mathbf{x})=x_{(1)}+x_{(2)}+\dotsb+x_{(k)}$, the some of $k$ largest components of $\mathbf{x}\in\mathbb{R}^d$, is convex, because $$ f(\mathbf{x})=\max\{x_{i_1} +\dotsb + x_{i_k} : 1\le i_1 <i_2 < \dotsb < i_k \le n\}. $$
Maximum eigenvalue of a symmetric matrix $\lambda_{\max}: \mathbb{S}^d \to \mathbb{R}$ is convex, because $$ \lambda_{\max}(\mathbf{X}) = \max_{\mathbf{v}^T\mathbf{v}=1} \mathbf{v}^T\mathbf{X}\mathbf{v}. $$ (Rayleigh quotient). The maximand is linear (hence convex) in $\mathbf{X}$ for each $\mathbf{v}$.
- Minimum eigenvalue of a symmetric matrix is concave.
Sum of $k$ largest eigenvalues of a symmetric matrix is convex, because $$ \sum_{i=1}^k\lambda_{i}(\mathbf{X}) = \max_{\mathbf{V}^T\mathbf{V}=\mathbf{I}_k, \mathbf{V}\in\mathbb{R}^{d\times k}} \text{tr}(\mathbf{V}^T\mathbf{X}\mathbf{V}) $$ (Ky Fan, 1949).
Support function of a set: $\sigma_C(\mathbf{x}) = \sup_{\mathbf{y}\in C} \langle \mathbf{x}, \mathbf{y} \rangle$ is convex (with an obvious domain), because $\langle \mathbf{x}, \mathbf{y} \rangle$ is convex (linear) in $\mathbf{x}$ for each $\mathbf{y}\in C$.
- Ex) dual norm: $\|\mathbf{x}\|_* = \sup_{\|\mathbf{y}\| \le 1} \langle \mathbf{x}, \mathbf{y} \rangle = \sigma_C(\mathbf{x})$, where $C=\{\mathbf{y}: \|\mathbf{y}\| \le 1\}$ is a norm ball.
- Hence $\ell_p$ norm is a support function of the unit $\ell_q$ norm ball, $1/p+1/q=1$.
Matrix perspective function $f(\mathbf{x},\mathbf{Y}) = \mathbf{x}^T\mathbf{Y}^{-1}\mathbf{x}$ is convex with $\text{dom}f=\mathbb{R}^d\times\mathbb{S}_{++}^d$ because $$ \mathbf{x}^T\mathbf{Y}^{-1}\mathbf{x} = \sup_{\mathbf{z}\in\mathbb{R}^d}\{2\mathbf{x}^T\mathbf{z} - \mathbf{z}^T\mathbf{Y}\mathbf{z}\}. $$
Kullback-Leibler divergence of two $d$-dimensional probability vectors $$ D(\mathbf{x} || \mathbf{y}) = \sum_{i=1}^d x_i\log(x_i/y_i) $$ (taking $0\log 0= 0$ and $\log 0=\infty$ by continuity) is convex on $\Delta_{d-1}\times\Delta_{d-1}$, because
- $g(x, t)=t\log (t/x)$ is convex since it is the perspective of $f(x)=-\log x$;
- $\tilde{D}(\mathbf{x}, \mathbf{y}) = \sum_{i=1}^d (x_i\log(x_i/y_i) - x_i + y_i)$ is convex on $\mathbb{R}_{+}^d\times \mathbb{R}_{+}^d$;
- $D(\mathbf{x} || \mathbf{y}) = \tilde{D}(\mathbf{x}, \mathbf{y}) + \iota_{\Delta_{d-1}}(\mathbf{x}) + \iota_{\Delta_{d-1}}(\mathbf{y})$.