Julia Version 1.9.3
Commit bed2cd540a1 (2023-08-24 14:43 UTC)
Build Info:
Official https://julialang.org/ release
Platform Info:
OS: macOS (x86_64-apple-darwin22.4.0)
CPU: 8 × Intel(R) Core(TM) i5-8279U CPU @ 2.40GHz
WORD_SIZE: 64
LIBM: libopenlibm
LLVM: libLLVM-14.0.6 (ORCJIT, skylake)
Threads: 2 on 8 virtual coresQR Decomposition
Advanced Statistical Computing
Joong-Ho Won
Seoul National University
October 2023
QR Decomposition
We learned Cholesky decomposition as one approach for solving linear regression.
Another approach for linear regression uses the QR decomposition.
This is how thelm()function in R does linear regression.
This is also how Julia’s (and MATLAB’s)\works for rectangular matrices.
using Random
Random.seed!(280) # seed
n, p = 5, 3
X = randn(n, p) # predictor matrix
y = randn(n) # response vector
# backslash finds the (minimum L2 norm) least squares solution
X \ y3-element Vector{Float64}:
0.3795466676698624
0.6508866456093487
0.39225041956535506We want to understand what is QR and how it is used for solving least squares problem.
Definitions
Assume \(\mathbf{X} \in \mathbb{R}^{n \times p}\) has full column rank. Necessarilly \(n \ge p\).
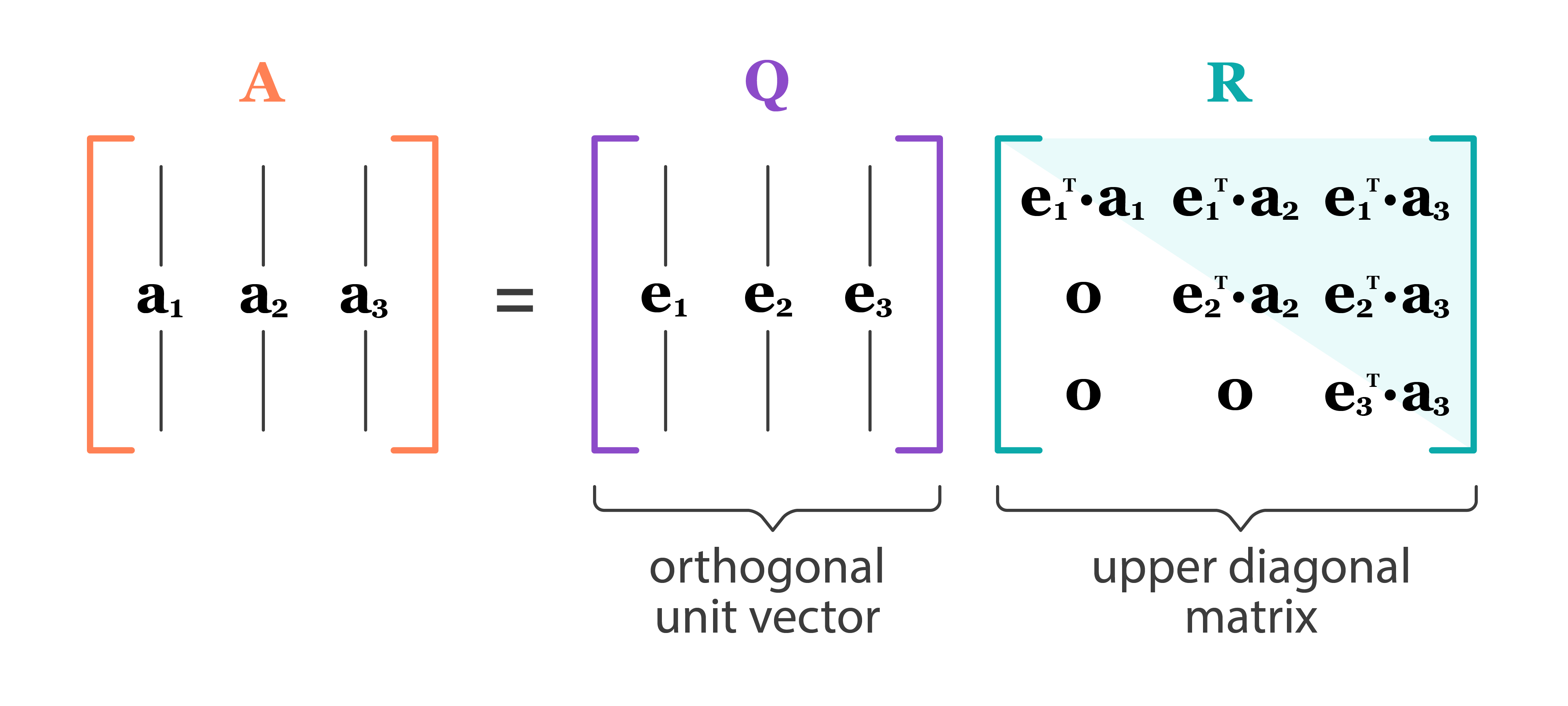
Full QR decomposition:
\[ \mathbf{X} = \mathbf{Q} \mathbf{R}, \]- \(\mathbf{Q} \in \mathbb{R}^{n \times n}\), \(\mathbf{Q}^T \mathbf{Q} = \mathbf{Q}\mathbf{Q}^T = \mathbf{I}_n\). In other words, \(\mathbf{Q}\) is an orthogonal matrix.
- First \(p\) columns of \(\mathbf{Q}\) form an orthonormal basis of \({\cal R}(\mathbf{X})\) (range or column space of \(\mathbf{X}\))
- Last \(n-p\) columns of \(\mathbf{Q}\) form an orthonormal basis of \({\cal N}(\mathbf{X}^T)\) (null space of \(\mathbf{X}^T\))
- First \(p\) columns of \(\mathbf{Q}\) form an orthonormal basis of \({\cal R}(\mathbf{X})\) (range or column space of \(\mathbf{X}\))
- Recall that \(\mathcal{N}(\mathbf{X}^T)=\mathcal{R}(\mathbf{X})^{\perp}\) and \(\mathcal{R}(\mathbf{X}) \oplus \mathcal{N}(\mathbf{X}^T) = \mathbb{R}^n\).
- \(\mathbf{R} \in \mathbb{R}^{n \times p}\) is upper triangular with positive diagonal entries.
- The lower \((n-p)\times p\) block of \(\mathbf{R}\) is \(\mathbf{0}\) (why?).
- \(\mathbf{Q} \in \mathbb{R}^{n \times n}\), \(\mathbf{Q}^T \mathbf{Q} = \mathbf{Q}\mathbf{Q}^T = \mathbf{I}_n\). In other words, \(\mathbf{Q}\) is an orthogonal matrix.
- Reduced QR decomposition: \[
\mathbf{X} = \mathbf{Q}_1 \mathbf{R}_1,
\] where
- \(\mathbf{Q}_1 \in \mathbb{R}^{n \times p}\), \(\mathbf{Q}_1^T \mathbf{Q}_1 = \mathbf{I}_p\). In other words, \(\mathbf{Q}_1\) is a partially orthogonal matrix. Note \(\mathbf{Q}_1\mathbf{Q}_1^T \neq \mathbf{I}_n\).
- \(\mathbf{R}_1 \in \mathbb{R}^{p \times p}\) is an upper triangular matrix with positive diagonal entries.
- Given QR decomposition \(\mathbf{X} = \mathbf{Q} \mathbf{R}\), \[
\mathbf{X}^T \mathbf{X} = \mathbf{R}^T \mathbf{Q}^T \mathbf{Q} \mathbf{R} = \mathbf{R}^T \mathbf{R} = \mathbf{R}_1^T \mathbf{R}_1.
\]
- Once we have a (reduced) QR decomposition of \(\mathbf{X}\), we automatically have the Cholesky decomposition of the Gram matrix \(\mathbf{X}^T \mathbf{X}\).
Application: least squares
Normal equation \[ \mathbf{X}^T\mathbf{X}\beta = \mathbf{X}^T\mathbf{y} \] is equivalently written with reduced QR as \[ \mathbf{R}_1^T\mathbf{R}_1\beta = \mathbf{R}_1^T\mathbf{Q}_1^T\mathbf{y} \]
\(\mathbf{R}_1\) is invertible: we only need to solve the triangluar system \[ \mathbf{R}_1\beta = \mathbf{Q}_1^T\mathbf{y} \] Multiplication \(\mathbf{Q}_1^T \mathbf{y}\) is done implicitly (see below).
This method is numerically more stable than directly solving the normal equation, since \(\kappa(\mathbf{X}^T\mathbf{X}) = \kappa(\mathbf{X})^2\)!
In case we need standard errors, compute inverse of \(\mathbf{R}_1^T \mathbf{R}_1\). This involves triangular solves.
Gram-Schmidt procedure
- Wait! Does \(\mathbf{X}\) always have a QR decomposition?
- Yes. It is equivalent to the Gram-Schmidt procedure for basis orthonormalization.

Assume \(\mathbf{X} = [\mathbf{x}_1 | \dotsb | \mathbf{x}_p] \in \mathbb{R}^{n \times p}\) has full column rank. That is, \(\mathbf{x}_1,\ldots,\mathbf{x}_p\) are linearly independent.
Gram-Schmidt (GS) procedure produces nested orthonormal basis vectors \(\{\mathbf{q}_1, \dotsc, \mathbf{q}_p\}\) that spans \(\mathcal{R}(\mathbf{X})\), i.e., \[ \begin{split} \text{span}(\{\mathbf{x}_1\}) &= \text{span}(\{\mathbf{q}_1\}) \\ \text{span}(\{\mathbf{x}_1, \mathbf{x}_2\}) &= \text{span}(\{\mathbf{q}_1, \mathbf{q}_2\}) \\ & \vdots \\ \text{span}(\{\mathbf{x}_1, \mathbf{x}_2, \dotsc, \mathbf{x}_p\}) &= \text{span}(\{\mathbf{q}_1, \mathbf{q}_2, \dotsc, \mathbf{q}_p\}) \end{split} \] and \(\langle \mathbf{q}_i, \mathbf{q}_j \rangle = \delta_{ij}\).
- The algorithm:
- Initialize \(\mathbf{q}_1 = \mathbf{x}_1 / \|\mathbf{x}_1\|_2\)
- For \(k=2, \ldots, p\), \[ \begin{eqnarray*} \mathbf{v}_k &=& \mathbf{x}_k - P_{\text{span}(\{\mathbf{q}_1,\ldots,\mathbf{q}_{k-1}\})}(\mathbf{x}_k) = \mathbf{x}_k - \sum_{j=1}^{k-1} \langle \mathbf{q}_j, \mathbf{x}_k \rangle \cdot \mathbf{q}_j \\ \mathbf{q}_k &=& \mathbf{v}_k / \|\mathbf{v}_k\|_2 \end{eqnarray*} \]
GS conducts reduced QR
\(\mathbf{Q} = [\mathbf{q}_1 | \dotsb | \mathbf{q}_p]\). Obviously \(\mathbf{Q}^T \mathbf{Q} = \mathbf{I}_p\).
Where is \(\mathbf{R}\)?
- Let \(r_{jk} = \langle \mathbf{q}_j, \mathbf{x}_k \rangle\) for \(j < k\), and \(r_{kk} = \|\mathbf{v}_k\|_2\).
- Re-write the above expression: \[
r_{kk} \mathbf{q}_k = \mathbf{x}_k - \sum_{j=1}^{k-1} r_{jk} \cdot \mathbf{q}_j
\] or \[
\mathbf{x}_k = r_{kk} \mathbf{q}_k + \sum_{j=1}^{k-1} r_{jk} \cdot \mathbf{q}_j
.
\]
- If we let \(r_{jk} = 0\) for \(j > k\), then \(\mathbf{R}=(r_{jk})\) is upper triangular and \[ \mathbf{X} = \mathbf{Q}\mathbf{R} . \]
Classical Gram-Schmidt
using LinearAlgebra
function cgs(X::Matrix{T}) where T<:AbstractFloat
n, p = size(X)
Q = Matrix{T}(undef, n, p)
R = zeros(T, p, p)
for j=1:p
Q[:, j] .= X[:, j]
for i=1:j-1
R[i, j] = dot(Q[:, i], X[:, j])
Q[:, j] .-= R[i, j] * Q[:, i]
end
R[j, j] = norm(Q[:, j])
Q[:, j] /= R[j, j]
end
Q, R
endcgs (generic function with 1 method)- CGS is unstable (we lose orthogonality due to roundoff errors) when columns of \(\mathbf{X}\) are almost collinear.
4×3 Matrix{Float32}:
1.0 1.0 1.0
1.19209f-7 0.0 0.0
0.0 1.19209f-7 0.0
0.0 0.0 1.19209f-74×3 Matrix{Float32}:
1.0 0.0 0.0
1.19209f-7 -0.707107 -0.707107
0.0 0.707107 0.0
0.0 0.0 0.7071073×3 Matrix{Float32}:
1.0 -8.42937f-8 -8.42937f-8
-8.42937f-8 1.0 0.5
-8.42937f-8 0.5 1.0Qis hardly orthogonal.- Where exactly does the problem occur? (HW)
Modified Gram-Schmidt
- The algorithm:
- Initialize \(\mathbf{q}_1 = \mathbf{x}_1 / \|\mathbf{x}_1\|_2\)
- For \(k=2, \ldots, p\), \[ \small \begin{eqnarray*} \mathbf{v}_k &=& \mathbf{x}_k - P_{\text{span}(\{\mathbf{q}_1,\ldots,\mathbf{q}_{k-1}\})}(\mathbf{x}_k) = \mathbf{x}_k - \sum_{j=1}^{k-1} \langle \mathbf{q}_j, \mathbf{x}_k \rangle \cdot \mathbf{q}_j \\ &=& \mathbf{x}_k - \sum_{j=1}^{k-1} \left\langle \mathbf{q}_j, \mathbf{x}_k - \sum_{l=1}^{j-1}\langle \mathbf{q}_l, \mathbf{x}_k \rangle \mathbf{q}_l \right\rangle \cdot \mathbf{q}_j \\ \mathbf{q}_k &=& \mathbf{v}_k / \|\mathbf{v}_k\|_2 \end{eqnarray*} \]
function mgs!(X::Matrix{T}) where T<:AbstractFloat
n, p = size(X)
R = zeros(T, p, p)
for j=1:p
for i=1:j-1
R[i, j] = dot(X[:, i], X[:, j])
X[:, j] -= R[i, j] * X[:, i]
end
R[j, j] = norm(X[:, j])
X[:, j] /= R[j, j]
end
X, R
endmgs! (generic function with 1 method)- \(\mathbf{X}\) is overwritten by \(\mathbf{Q}\) and \(\mathbf{R}\) is stored in a separate array.
4×3 Matrix{Float32}:
1.0 0.0 0.0
1.19209f-7 -0.707107 -0.408248
0.0 0.707107 -0.408248
0.0 0.0 0.816497- So MGS is more stable than CGS. However, even MGS is not completely immune to instability.
Qis hardly orthogonal.- Where exactly the problem occurs? (HW)
Computational cost of CGS and MGS is \(\sum_{k=1}^p 4n(k-1) \approx 2np^2\).
There are 3 algorithms to compute QR: (modified) Gram-Schmidt, Householder transform, (fast) Givens transform.
In particular, the Householder transform for QR is implemented in LAPACK and thus used in R and Julia.
QR by Householder transform

Alston Scott Householder (1904-1993)
This is the algorithm for solving linear regression in R.
Assume again \(\mathbf{X} = [\mathbf{x}_1 | \dotsb | \mathbf{x}_p] \in \mathbb{R}^{n \times p}\) has full column rank.
Gram-Schmidt can be understood as: \[ \mathbf{X}\mathbf{R}_{1} \mathbf{R}_2 \cdots \mathbf{R}_n = \mathbf{Q}_1 \] where \(\mathbf{R}_j\) are a sequence of upper triangular matrices.
Householder QR does \[ \mathbf{H}_{p} \cdots \mathbf{H}_2 \mathbf{H}_1 \mathbf{X} = \begin{bmatrix} \mathbf{R}_1 \\ \mathbf{0} \end{bmatrix}, \] where \(\mathbf{H}_j \in \mathbf{R}^{n \times n}\) are a sequence of Householder transformation matrices.
It yields the full QR where \(\mathbf{Q} = \mathbf{H}_1 \cdots \mathbf{H}_p \in \mathbb{R}^{n \times n}\). Recall that CGS/MGS only produces the reduced QR decomposition.
Householder transformation
- For arbitrary \(\mathbf{v}, \mathbf{w} \in \mathbb{R}^{n}\) with \(\|\mathbf{v}\|_2 = \|\mathbf{w}\|_2\), we can construct a Householder matrix (or Householder reflector) \[ \mathbf{H} = \mathbf{I}_n - 2 \mathbf{u} \mathbf{u}^T, \quad \mathbf{u} = - \frac{1}{\|\mathbf{v} - \mathbf{w}\|_2} (\mathbf{v} - \mathbf{w}), \] that transforms \(\mathbf{v}\) to \(\mathbf{w}\): \[ \mathbf{H} \mathbf{v} = \mathbf{w}. \] \(\mathbf{H}\) is symmetric and orthogonal. Calculation of Householder vector \(\mathbf{u}\) costs \(4n\) flops for general \(\mathbf{u}\) and \(\mathbf{w}\).
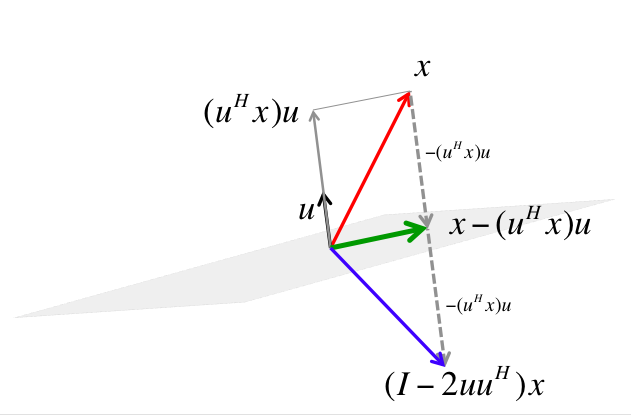
https://www.cs.utexas.edu/users/flame/laff/alaff-beta/images/Chapter03/reflector.png
Now choose \(\mathbf{H}_1\) so that \[ \mathbf{H}_1 \mathbf{x}_1 = \begin{bmatrix} \pm\|\mathbf{x}_{1}\|_2 \\ 0 \\ \vdots \\ 0 \end{bmatrix}. \] That is, \(\mathbf{x} = \mathbf{x}_1\) and \(\mathbf{w} = \pm\|\mathbf{x}_1\|_2\mathbf{e}_1\).
Left-multiplying \(\mathbf{H}_1\) zeros out the first column of \(\mathbf{X}\) below (1, 1).
- Take \(\mathbf{H}_2\) to zero the second column below diagonal: \[ \mathbf{H}_2\mathbf{H}_1\mathbf{X} = \begin{bmatrix} \times & \times & \times & \times \\ 0 & \boldsymbol{\times} & \boldsymbol{\times} & \boldsymbol{\times} \\ 0 & \mathbf{0} & \boldsymbol{\times} & \boldsymbol{\times} \\ 0 & \mathbf{0} & \boldsymbol{\times} & \boldsymbol{\times} \\ 0 & \mathbf{0} & \boldsymbol{\times} & \boldsymbol{\times} \end{bmatrix} \]
- In general, choose the \(j\)-th Householder transform \(\mathbf{H}_j = \mathbf{I}_n - 2 \mathbf{u}_j \mathbf{u}_j^T\), where \[ \mathbf{u}_j = \begin{bmatrix} \mathbf{0}_{j-1} \\ {\tilde u}_j \end{bmatrix}, \quad {\tilde u}_j \in \mathbb{R}^{n-j+1}, \] to zero the \(j\)-th column below diagonal. \(\mathbf{H}_j\) takes the form \[ \mathbf{H}_j = \begin{bmatrix} \mathbf{I}_{j-1} & \\ & \mathbf{I}_{n-j+1} - 2 {\tilde u}_j {\tilde u}_j^T \end{bmatrix} = \begin{bmatrix} \mathbf{I}_{j-1} & \\ & {\tilde H}_{j} \end{bmatrix}. \]
Applying a Householder transform \(\mathbf{H} = \mathbf{I} - 2 \mathbf{u} \mathbf{u}^T\) to a matrix \(\mathbf{X} \in \mathbb{R}^{n \times p}\) \[ \mathbf{H} \mathbf{X} = \mathbf{X} - 2 \mathbf{u} (\mathbf{u}^T \mathbf{X}) \] costs \(4np\) flops. Householder updates never entails explicit formation of the Householder matrices.
Note applying \({\tilde H}_j\) to \(\mathbf{X}\) only needs \(4(n-j+1)(p-j+1)\) flops.
Algorithm
- The process is done in place. Upper triangular part of \(\mathbf{X}\) is overwritten by \(\mathbf{R}_1\) and the essential Householder vectors (\(\tilde u_{j1}\) is normalized to 1) are stored in \(\mathbf{X}[j:n,j]\).
- Can ensure \(u_{j1} \neq 0\) by a clever choice of the sign in determining vector \(\mathbf{w}\) above (HW).
- At the \(j\)-th stage
- computing the Householder vector \({\tilde u}_j\) costs \(3(n-j+1)\) flops
- applying the Householder transform \({\tilde H}_j\) to the \(\mathbf{X}[j:n, j:p]\) block costs \(4(n-j+1)(p-j+1)\) flops
- In total we need \(\sum_{j=1}^p [3(n-j+1) + 4(n-j+1)(p-j+1)] \approx 2np^2 - \frac 23 p^3\) flops.
Where is \(\mathbf{Q}\)?
- \(\mathbf{Q} = \mathbf{H}_1 \cdots \mathbf{H}_p\). In some applications, it’s necessary to form the orthogonal matrix \(\mathbf{Q}\).
Accumulating \(\mathbf{Q}\) costs another \(2np^2 - \frac 23 p^3\) flops.
When computing \(\mathbf{Q}^T \mathbf{v}\) or \(\mathbf{Q} \mathbf{v}\) as in some applications (e.g., solve linear equation using QR), no need to form \(\mathbf{Q}\). Simply apply Householder transforms successively to the vector \(\mathbf{v}\). (HW)
Computational cost of Householder QR for linear regression: \(2n p^2 - \frac 23 p^3\) (regression coefficients and \(\hat \sigma^2\)) or more (fitted values, s.e., …).
Householder QR with column pivoting
Consider rank deficient \(\mathbf{X}\).
- At the \(j\)-th stage, swap the column
X[:, j]withX[:, k]wherekis the column number inX[j:n,j:p]with maximum \(\ell_2\) norm to be the pivot column. If the maximum \(\ell_2\) norm is 0, it stops, ending with \[ \mathbf{X} \mathbf{P} = \mathbf{Q} \begin{bmatrix} \mathbf{R}_{11} & \mathbf{R}_{12} \\ \mathbf{0}_{(n-r) \times r} & \mathbf{0}_{(n-r) \times (p-r)} \end{bmatrix}, \] where \(\mathbf{P} \in \mathbb{R}^{p \times p}\) is a permutation matrix and \(r\) is the rank of \(\mathbf{X}\). QR with column pivoting is rank revealing.
Implementation
Julia functions:
qr,qrfact!, or call LAPACK wrapper functionsgeqrf!andgeqp3!R function:
qr. Wraps LAPACK routinedgeqp3(withLAPACK=TRUE; default uses LINPACK, an ancient version of LAPACK).
([0.12623784496408763 -1.1278278196026448 -0.8826696457022515; -2.3468794813834966 1.1478628422667982 1.7138424693341203; … ; -0.23920888512829233 -0.23706547458394342 1.0818212935057896; -0.5784508270929073 -0.6809935026697 -0.17040614729185025], [-1.794259674143309, 1.0913793110025305, 0.4266277597108536, -0.6244337204329091, 0.03204861737738283])3-element Vector{Float64}:
0.37954666766986195
0.6508866456093481
0.3922504195653549QRPivoted{Float64, Matrix{Float64}}
Q factor:
5×5 LinearAlgebra.QRPackedQ{Float64, Matrix{Float64}}:
-0.0407665 -0.692007 0.318693 0.185526 -0.619257
0.757887 -0.0465712 -0.260086 -0.522259 -0.288166
-0.618938 -0.233814 -0.404293 -0.624592 -0.0931611
0.0772486 -0.235405 -0.808135 0.53435 0.00216687
0.186801 -0.639431 0.119392 -0.131075 0.724429
R factor:
3×3 Matrix{Float64}:
-3.09661 1.60888 1.84089
0.0 1.53501 0.556903
0.0 0.0 -1.32492
permutation:
3-element Vector{Int64}:
1
2
33-element Vector{Float64}:
0.3795466676698624
0.6508866456093487
0.39225041956535506QR by Givens rotation
Householder transform \(\mathbf{H}_j\) introduces batch of zeros into a vector.
Givens transform (aka Givens rotation, Jacobi rotation, plane rotation) selectively zeros one element of a vector.
Overall QR by Givens rotation is less efficient than the Householder method, but is better suited for matrices with structured patterns of nonzero elements.
- Givens/Jacobi rotations: \[ \small \mathbf{G}(i,k,\theta) = \begin{bmatrix} 1 & & 0 & & 0 & & 0 \\ \vdots & \ddots & \vdots & & \vdots & & \vdots \\ 0 & & c & & s & & 0 \\ \vdots & & \vdots & \ddots & \vdots & & \vdots \\ 0 & & - s & & c & & 0 \\ \vdots & & \vdots & & \vdots & \ddots & \vdots \\ 0 & & 0 & & 0 & & 1 \end{bmatrix}, \] where \(c = \cos(\theta)\) and \(s = \sin(\theta)\). \(\mathbf{G}(i,k,\theta)\) is orthogonal.
- Pre-multiplication by \(\mathbf{G}(i,k,\theta)^T\) rotates counterclockwise \(\theta\) radians in the \((i,k)\) coordinate plane. If \(\mathbf{x} \in \mathbb{R}^n\) and \(\mathbf{y} = \mathbf{G}(i,k,\theta)^T \mathbf{x}\), then \[ \small y_j = \begin{cases} cx_i - s x_k & j = i \\ sx_i + cx_k & j = k \\ x_j & j \ne i, k \end{cases}. \] Apparently if we choose \(\tan(\theta) = -x_k / x_i\), or equivalently, \[ \small \begin{eqnarray*} c = \frac{x_i}{\sqrt{x_i^2 + x_k^2}}, \quad s = \frac{-x_k}{\sqrt{x_i^2 + x_k^2}}, \end{eqnarray*} \] then \(y_k=0\).
Pre-applying Givens transform \(\mathbf{G}(i,k,\theta)^T \in \mathbb{R}^{n \times n}\) to a matrix \(\mathbf{A} \in \mathbb{R}^{n \times m}\) only effects two rows of \(\mathbf{ A}\): \[ \mathbf{A}([i, k], :) \gets \begin{bmatrix} c & s \\ -s & c \end{bmatrix}^T \mathbf{A}([i, k], :), \] costing \(6m\) flops.
Post-applying Givens transform \(\mathbf{G}(i,k,\theta) \in \mathbb{R}^{m \times m}\) to a matrix \(\mathbf{A} \in \mathbb{R}^{n \times m}\) only effects two columns of \(\mathbf{A}\): \[ \mathbf{A}(:, [i,k]) \gets \mathbf{A}(:, [i,k]) \begin{bmatrix} c & s \\ -s & c \end{bmatrix}, \] costing \(6n\) flops.
- QR by Givens: \(\mathbf{G}_t^T \cdots \mathbf{G}_1^T \mathbf{X} = \begin{bmatrix} \mathbf{R}_1 \\ \mathbf{0} \end{bmatrix}\).
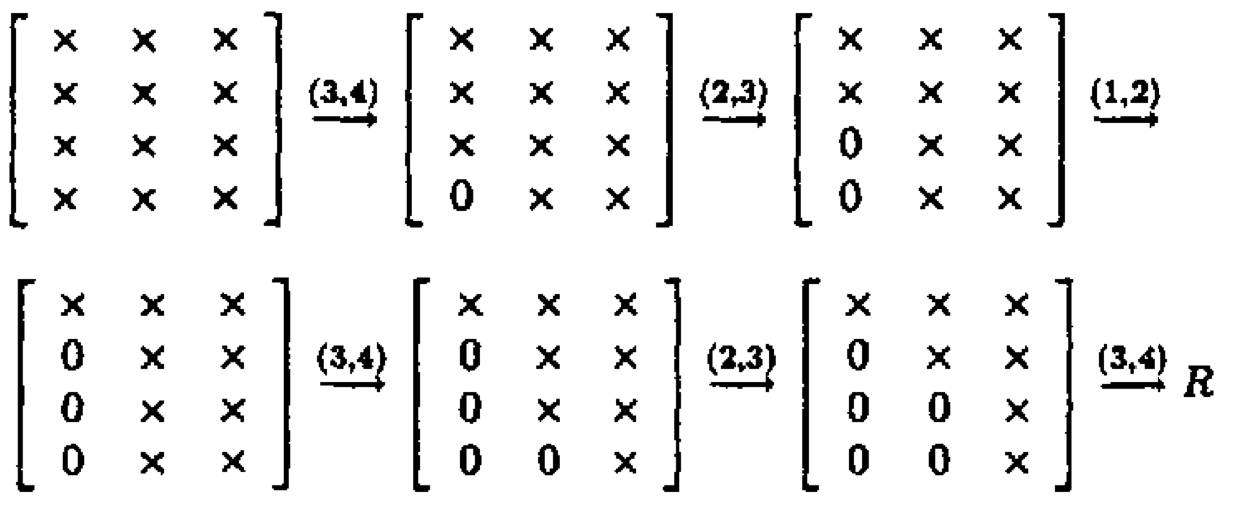
Zeros in \(\mathbf{X}\) can also be introduced row-by-row.
If \(\mathbf{X} \in \mathbb{R}^{n \times p}\), the total cost is \(3np^2 - p^3\) flops and \(O(np)\) square roots.
Note each Givens transform can be summarized by a single number, which is stored in the zeroed entry of \(\mathbf{X}\).
Applications: linear regression
QR decomposition of \(\mathbf{X}\): \(2np^2 - \frac 23 p^3\) flops.
Solve \(\mathbf{R}^T \mathbf{R} \beta = \mathbf{R}^T \mathbf{Q}^T \mathbf{y}\) for \(\beta\).
If \(\mathbf{X}\) is full rank, then \(\mathbf{R}\) is invertible, so we only need to solve the triangular system \[ \mathbf{R} \beta = \mathbf{Q}^T \mathbf{y} . \] Multiplication \(\mathbf{Q}^T \mathbf{y}\) is done implicitly.
If need standard errors, compute inverse of \(\mathbf{R}^T \mathbf{R}\). This involves triangular solves.
Further reading
Section II.5.3 of Computational Statistics by James Gentle (2010).
Chapter 5 of Matrix Computation by Gene Golub and Charles Van Loan (2013).